


备注
点击:ref:`此处 <sphx_glr_download_intermediate_tensorboard_profiler_tutorial.py>`下载完整示例代码
使用TensorBoard的PyTorch性能分析工具¶
Created On: Apr 20, 2021 | Last Updated: Oct 31, 2024 | Last Verified: Nov 05, 2024
此教程演示了如何使用TensorBoard插件与PyTorch性能分析工具来检测模型的性能瓶颈。
警告
与PyTorch性能分析工具集成的TensorBoard现已弃用。相反,使用Perfetto或Chrome追踪查看``trace.json``文件。在`生成追踪文件`(<https://pytorch.org/tutorials/recipes/recipes/profiler_recipe.html#using-tracing-functionality>)之后,只需将``trace.json``拖到`Perfetto UI`(<https://ui.perfetto.dev/>)或``chrome://tracing``中即可可视化你的配置文件。
介绍¶
PyTorch 1.8引入了更新的性能分析工具API,它可以记录CPU端操作以及GPU端的CUDA内核启动。性能分析工具可以在TensorBoard插件中可视化这些信息并提供性能瓶颈分析。
在本教程中,我们将使用一个简单的Resnet模型来演示如何使用TensorBoard插件分析模型性能。
步骤¶
准备数据和模型
使用性能分析工具记录执行事件
运行性能分析工具
使用TensorBoard查看结果并分析模型性能
借助性能分析工具提升性能
结合其他高级功能分析性能
附加实践:在AMD GPU上进行PyTorch性能分析
1. 准备数据和模型¶
首先,导入所有必需的库:
import torch
import torch.nn
import torch.optim
import torch.profiler
import torch.utils.data
import torchvision.datasets
import torchvision.models
import torchvision.transforms as T
然后准备输入数据。对于本教程,我们使用CIFAR10数据集。将其转换为所需格式并使用``DataLoader``加载每批数据。
transform = T.Compose(
[T.Resize(224),
T.ToTensor(),
T.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))])
train_set = torchvision.datasets.CIFAR10(root='./data', train=True, download=True, transform=transform)
train_loader = torch.utils.data.DataLoader(train_set, batch_size=32, shuffle=True)
接下来,创建Resnet模型、损失函数和优化器对象。为了在GPU上运行,将模型和损失函数移动到GPU设备。
device = torch.device("cuda:0")
model = torchvision.models.resnet18(weights='IMAGENET1K_V1').cuda(device)
criterion = torch.nn.CrossEntropyLoss().cuda(device)
optimizer = torch.optim.SGD(model.parameters(), lr=0.001, momentum=0.9)
model.train()
定义每批输入数据的训练步骤。
def train(data):
inputs, labels = data[0].to(device=device), data[1].to(device=device)
outputs = model(inputs)
loss = criterion(outputs, labels)
optimizer.zero_grad()
loss.backward()
optimizer.step()
2. 使用性能分析工具记录执行事件¶
性能分析工具通过上下文管理器启用,并接受多个参数,其中一些最有用的是:
schedule- 一个可调用对象,它以步长(int)作为单个参数,并返回每一步执行的性能分析操作。在此示例中,设置
wait=1, warmup=1, active=3, repeat=1,分析器将跳过第一个步骤/迭代,从第二个开始预热,记录接下来的三个迭代,之后分析结果将可用,并调用设置的 on_trace_ready(如果设置了)。总体而言,此循环重复一次。在 TensorBoard 插件中,每个循环称为一个“跨度”。在
wait步骤期间,分析器被禁用。在warmup步骤期间,分析器开始跟踪但结果会被丢弃,这是为了减少分析开销。在分析开始时的开销较高,容易对分析结果产生偏差。在active步骤期间,分析器正常工作并记录事件。on_trace_ready- 每个循环结束时调用的函数;在此示例中,我们使用torch.profiler.tensorboard_trace_handler来为 TensorBoard 生成结果文件。分析完成后,结果文件将保存到./log/resnet18目录。指定此目录作为logdir参数以在 TensorBoard 中分析配置文件。record_shapes- 是否记录操作输入的形状。profile_memory- 跟踪张量内存分配/释放。注意,对于版本低于 1.10 的旧版本 PyTorch,如果分析时间过长,请禁用它或升级到新版本。with_stack- 记录操作的源信息(文件和行号)。如果在 VS Code 中启动 TensorBoard(参考),单击堆栈帧将导航到特定代码行。
with torch.profiler.profile(
schedule=torch.profiler.schedule(wait=1, warmup=1, active=3, repeat=1),
on_trace_ready=torch.profiler.tensorboard_trace_handler('./log/resnet18'),
record_shapes=True,
profile_memory=True,
with_stack=True
) as prof:
for step, batch_data in enumerate(train_loader):
prof.step() # Need to call this at each step to notify profiler of steps' boundary.
if step >= 1 + 1 + 3:
break
train(batch_data)
另外,也支持以下非上下文管理器的启动/停止方式。
prof = torch.profiler.profile(
schedule=torch.profiler.schedule(wait=1, warmup=1, active=3, repeat=1),
on_trace_ready=torch.profiler.tensorboard_trace_handler('./log/resnet18'),
record_shapes=True,
with_stack=True)
prof.start()
for step, batch_data in enumerate(train_loader):
prof.step()
if step >= 1 + 1 + 3:
break
train(batch_data)
prof.stop()
3. 运行分析器¶
运行上述代码。分析结果将保存到 ./log/resnet18 目录下。
4. 使用 TensorBoard 查看结果并分析模型性能¶
备注
TensorBoard 插件支持已废弃,因此其中一些功能可能不再像以前那样有效。请查看其替代内容,HTA。
安装 PyTorch 分析器 TensorBoard 插件。
pip install torch_tb_profiler
启动 TensorBoard。
tensorboard --logdir=./log
在 Google Chrome 浏览器或 Microsoft Edge 浏览器中打开 TensorBoard 配置文件 URL(不支持 Safari)。
http://localhost:6006/#pytorch_profiler
您可以看到 Profiler 插件页面,如下所示。
概述
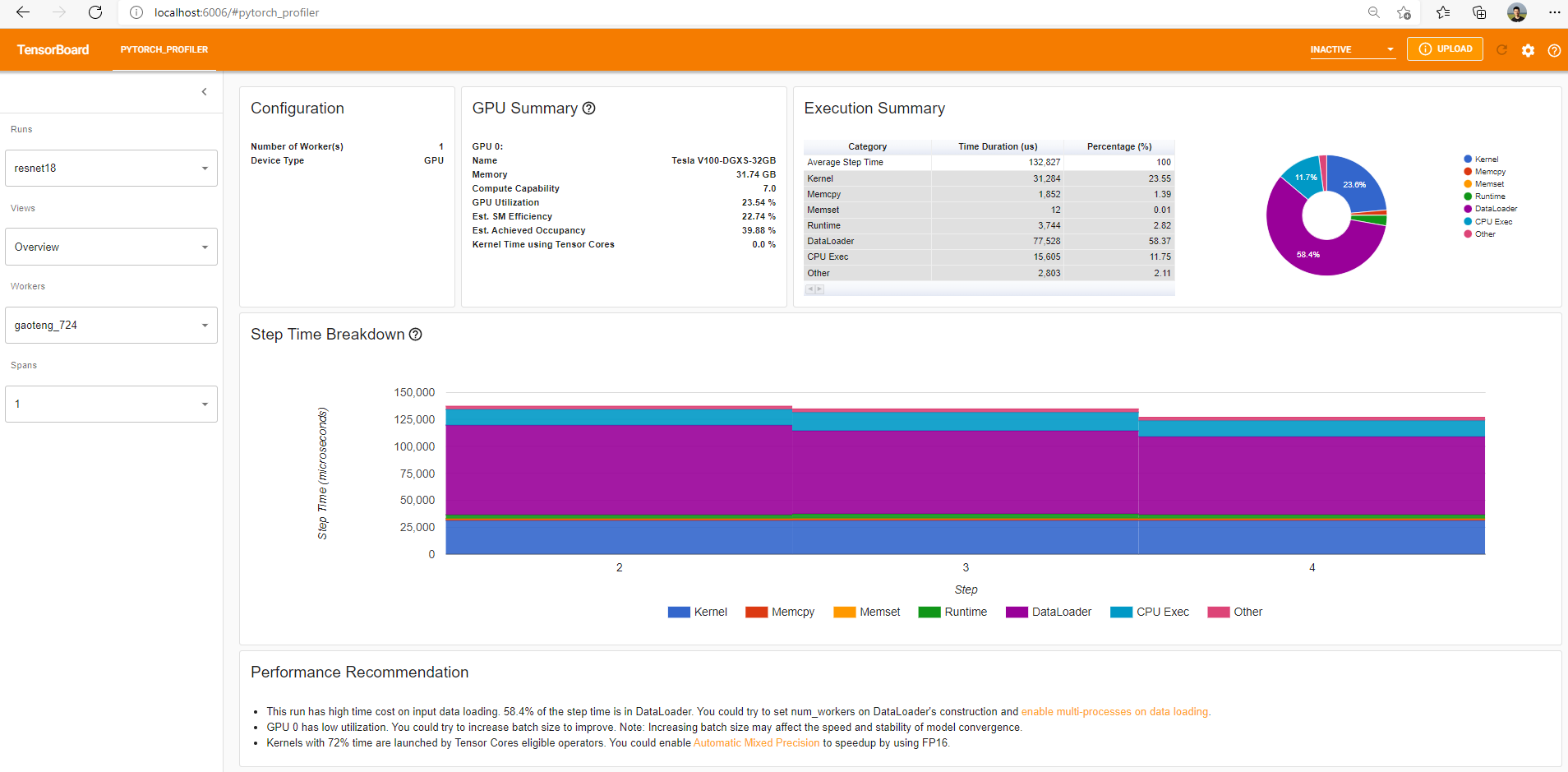
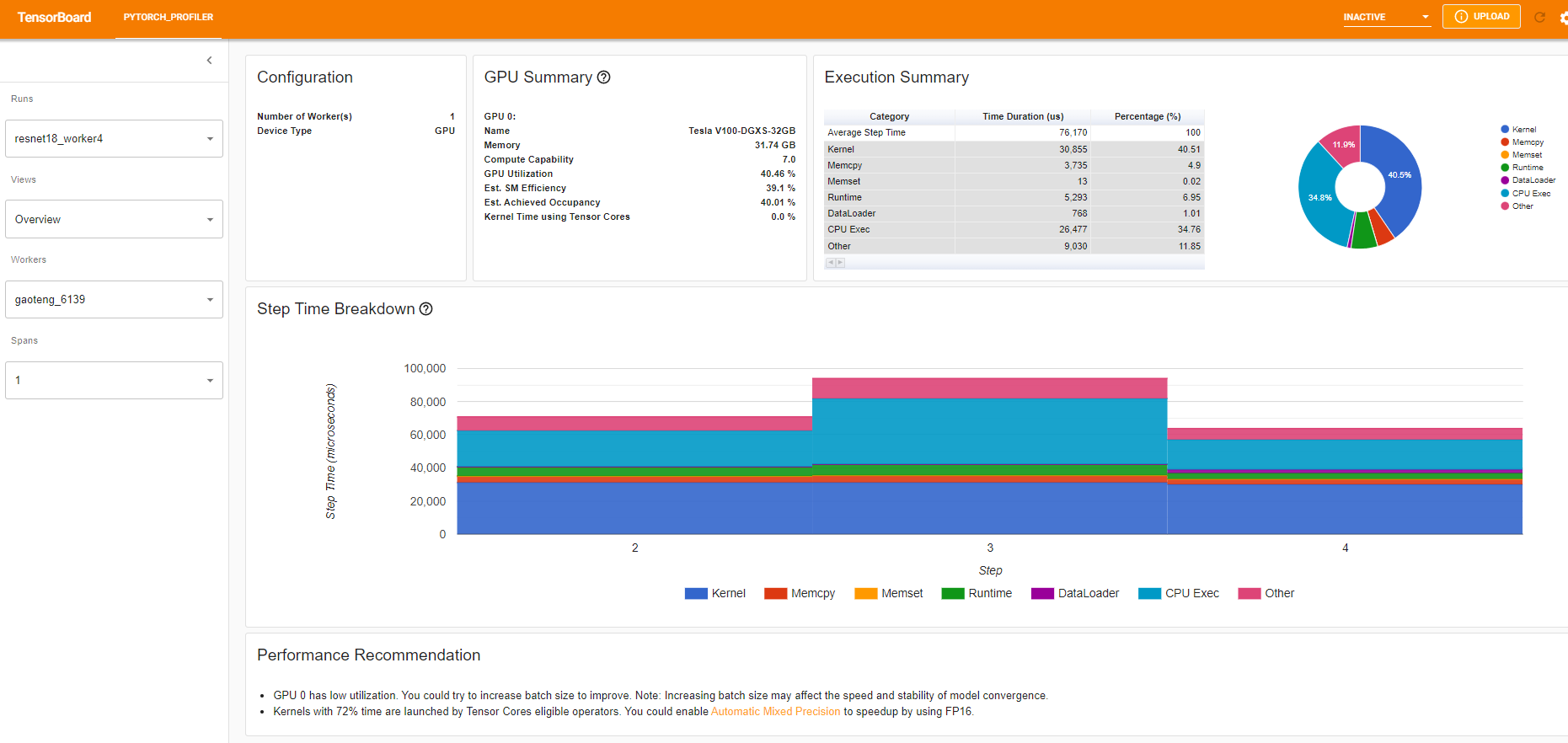
概览显示模型性能的高级摘要。
“GPU 概况”面板显示 GPU 配置、GPU 使用率和 Tensor Cores 使用情况。在本示例中,GPU 使用率较低。这些指标的详细信息在`此处 <https://github.com/pytorch/kineto/blob/main/tb_plugin/docs/gpu_utilization.md>`_。
“步骤时间分解”显示每个步骤在不同执行类别上花费时间的分布。在本示例中,您可以看到 DataLoader 的开销很大。
底部的“性能建议”使用分析数据自动突出可能的瓶颈,并提供可执行的优化建议。
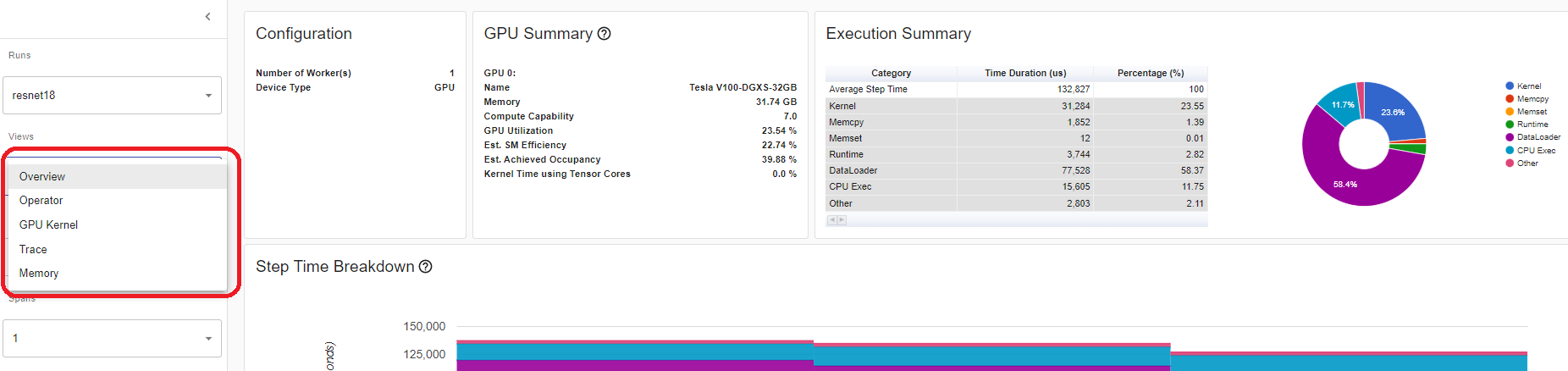
您可以在左侧“视图”下拉列表中更改视图页面。
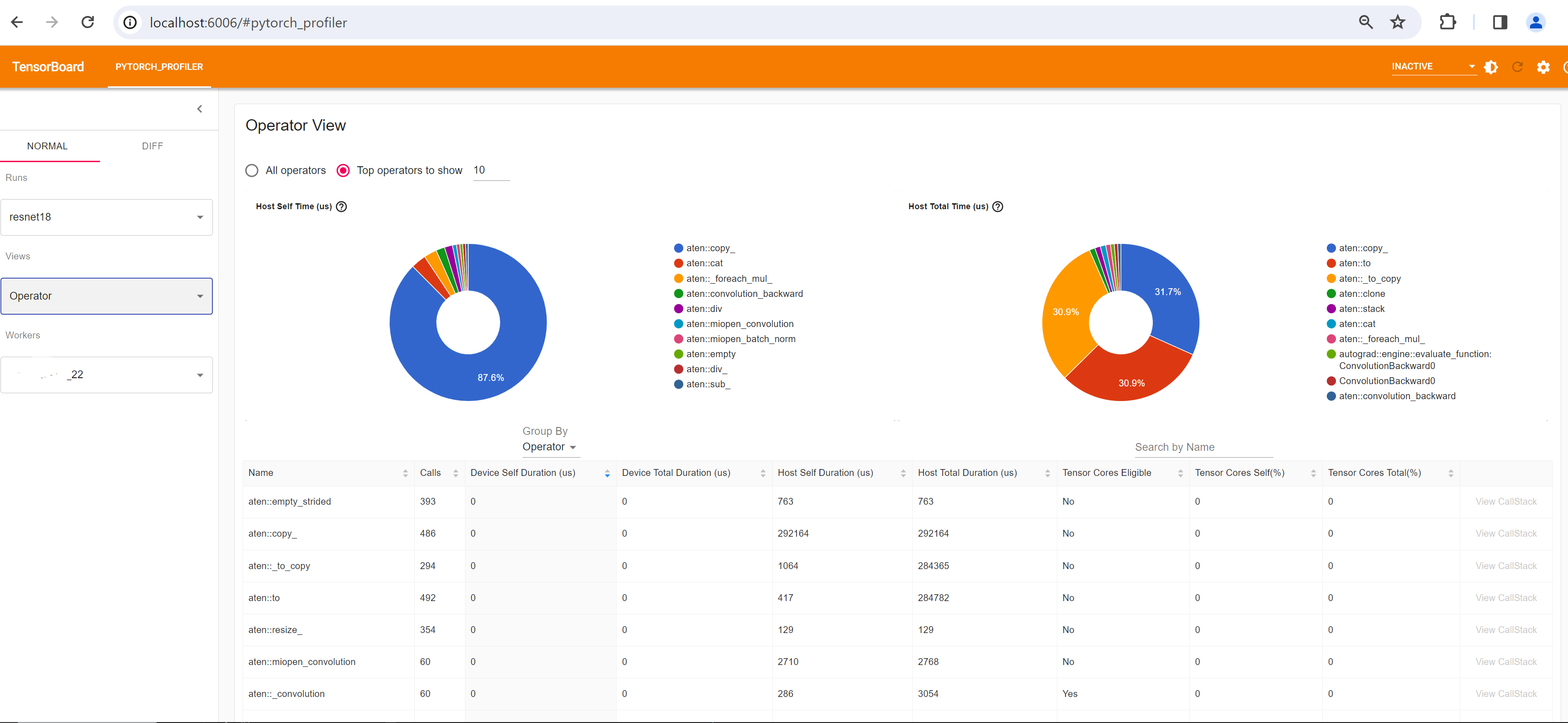
操作符视图
操作符视图显示在主机或设备上执行的每个 PyTorch 操作符的性能。
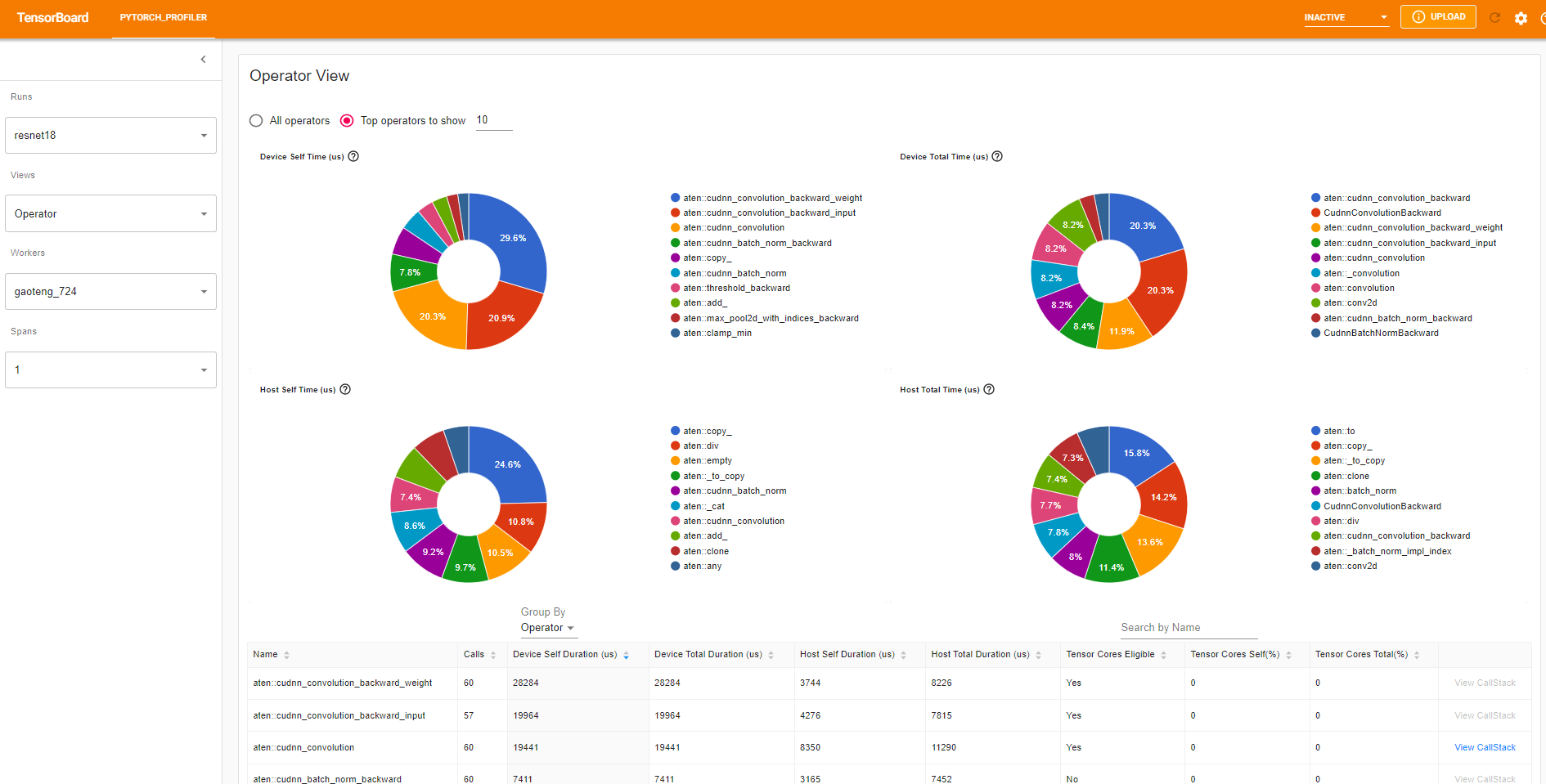
“Self”持续时间不包括其子操作符的时间。“Total”持续时间包括其子操作符的时间。
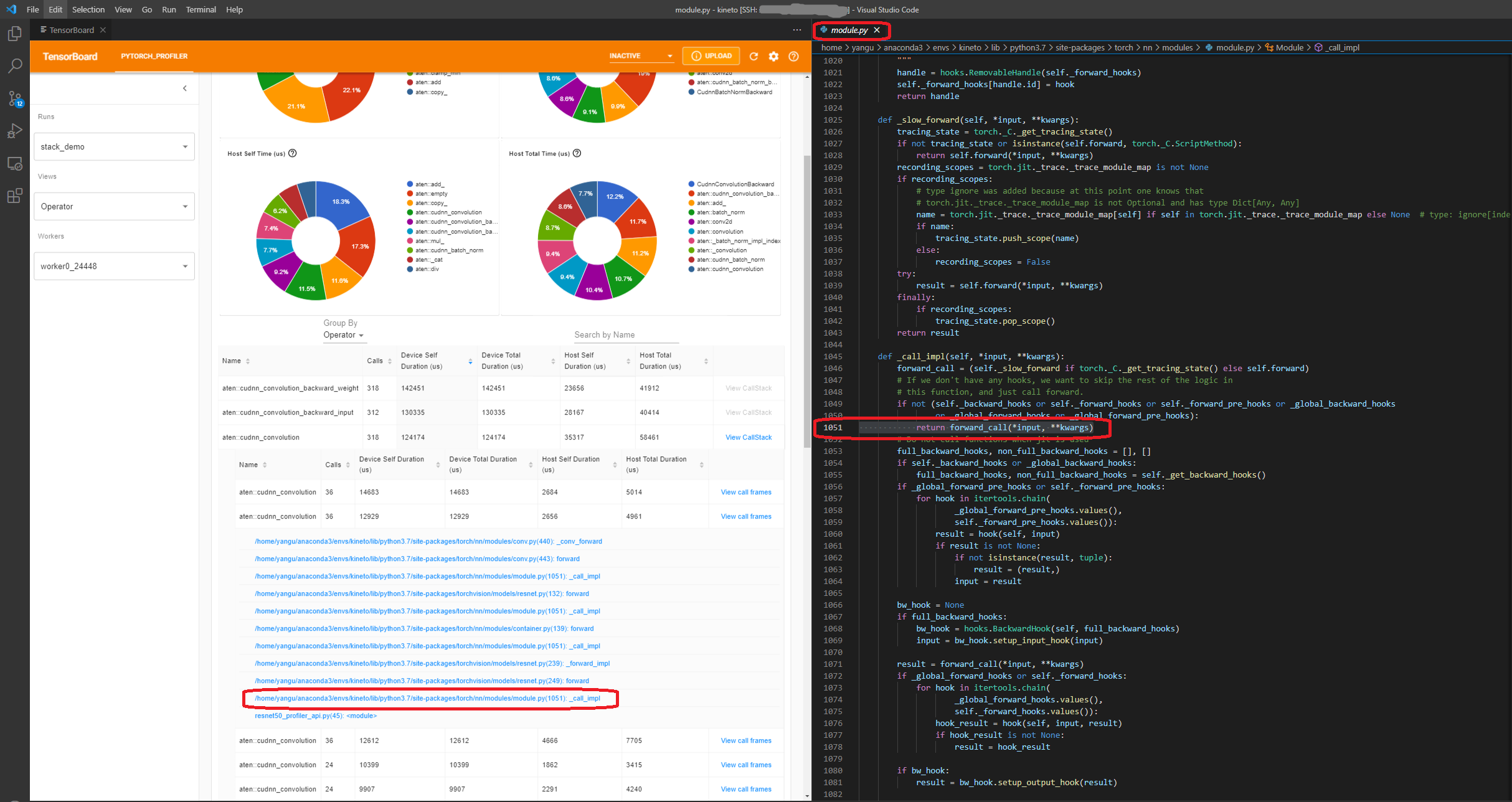
查看调用堆栈
单击操作符的 View Callstack,将显示具有相同名称但不同调用堆栈的操作符。然后在该子表中单击 View Callstack,调用堆栈帧将被显示。
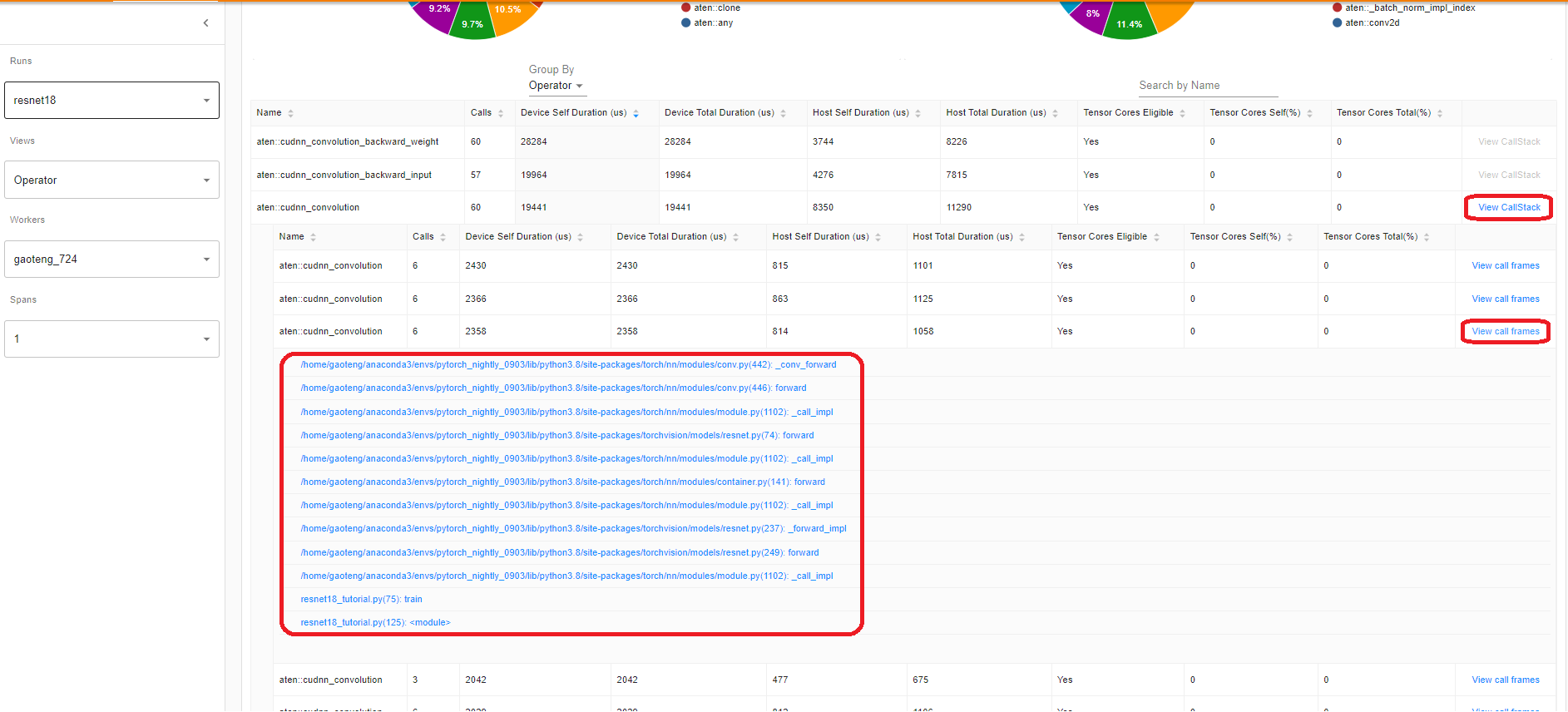
如果在 VS Code 中启动 TensorBoard(启动指南),单击调用堆栈帧将导航到特定代码行。
内核视图
GPU 内核视图显示所有内核在 GPU 上花费的时间。
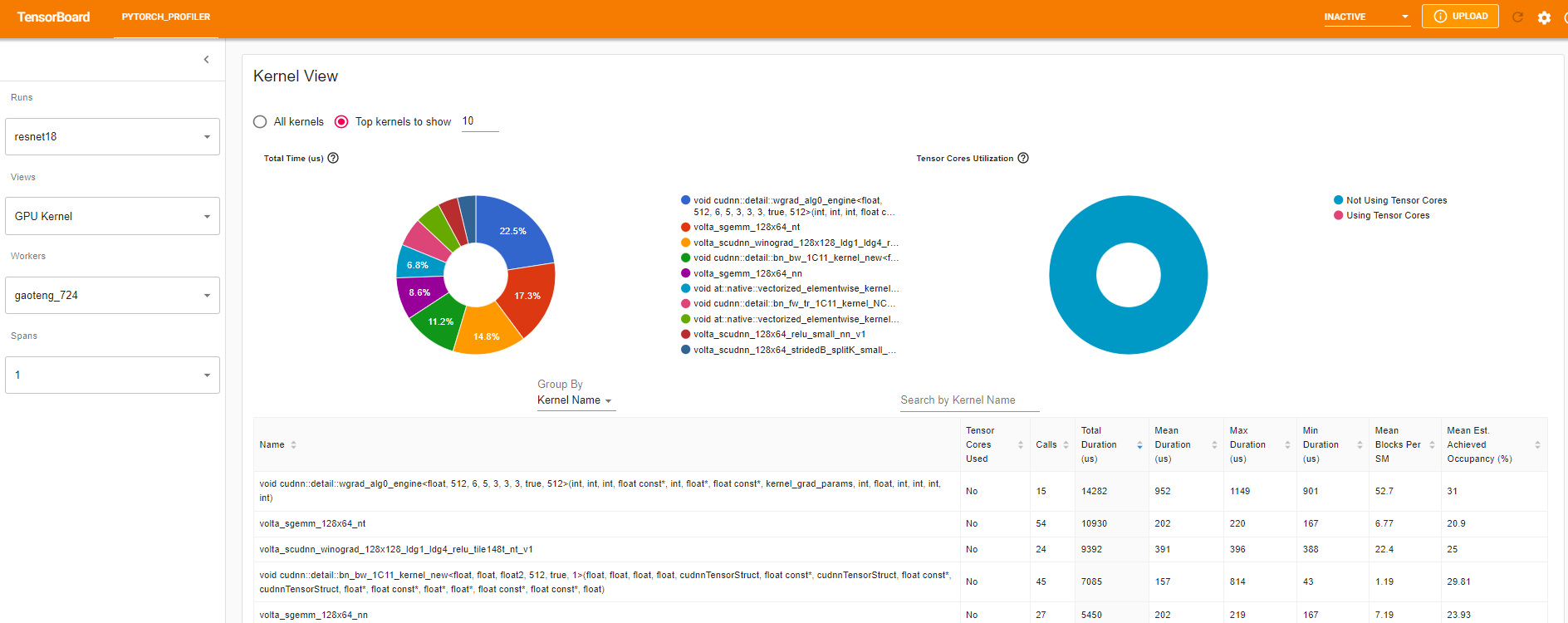
使用 Tensor Cores:是否此内核使用 Tensor Cores。
每个 SM 平均 Blocks:Blocks per SM = 此内核的 Blocks / 此 GPU 的 SM 数。如果此数值小于 1,则表示 GPU 多处理器未得到充分利用。“每个 SM 平均 Blocks”是此内核名称的所有运行的加权平均值,每次运行的持续时间作为权重。
平均预计实现占用率:预计实现占用率在此列的工具提示中定义。对于大多数情况,例如内存带宽受限的内核,数值越高越好。“平均预计实现占用率”是此内核名称所有运行的加权平均值,每次运行的持续时间作为权重。
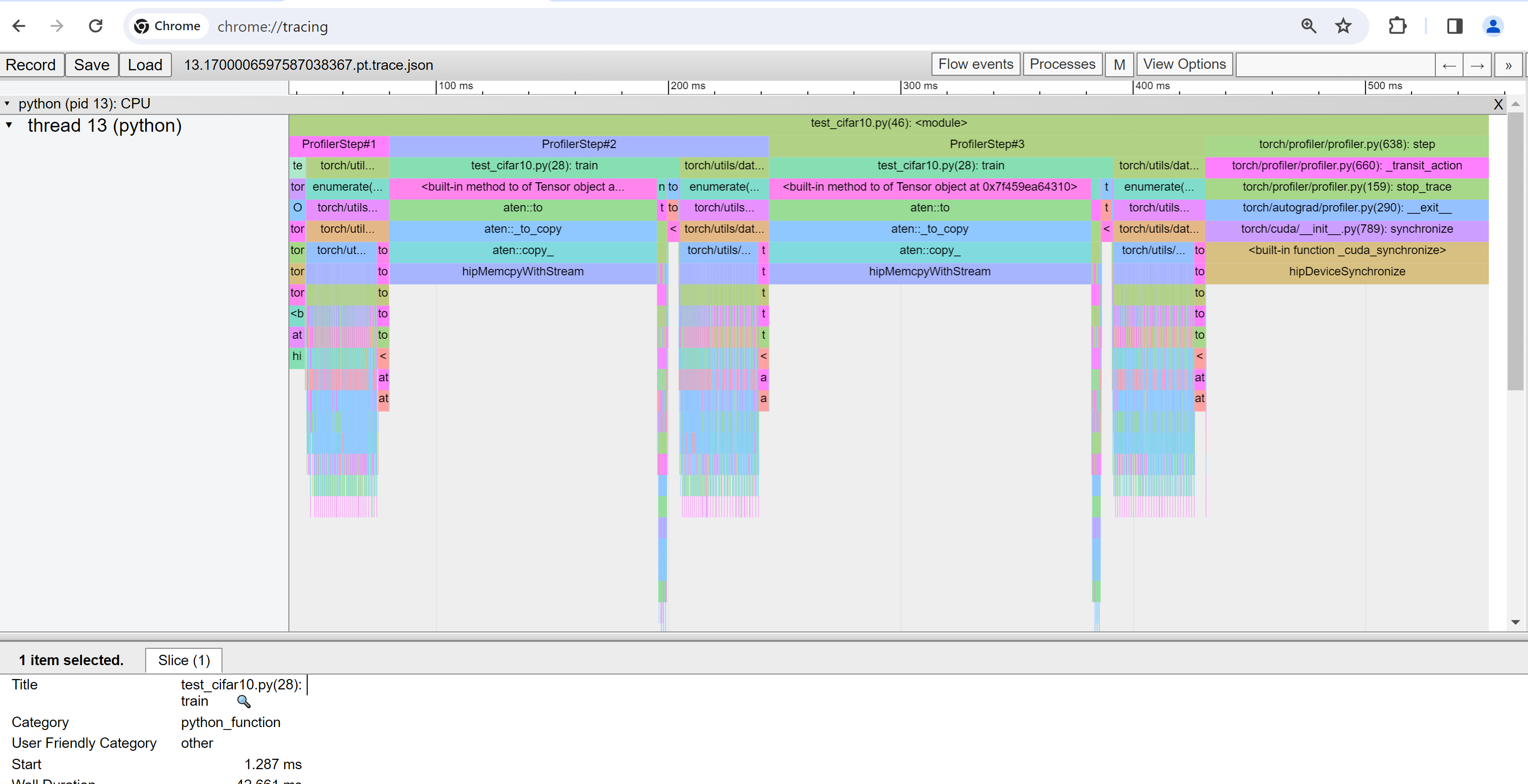
跟踪视图
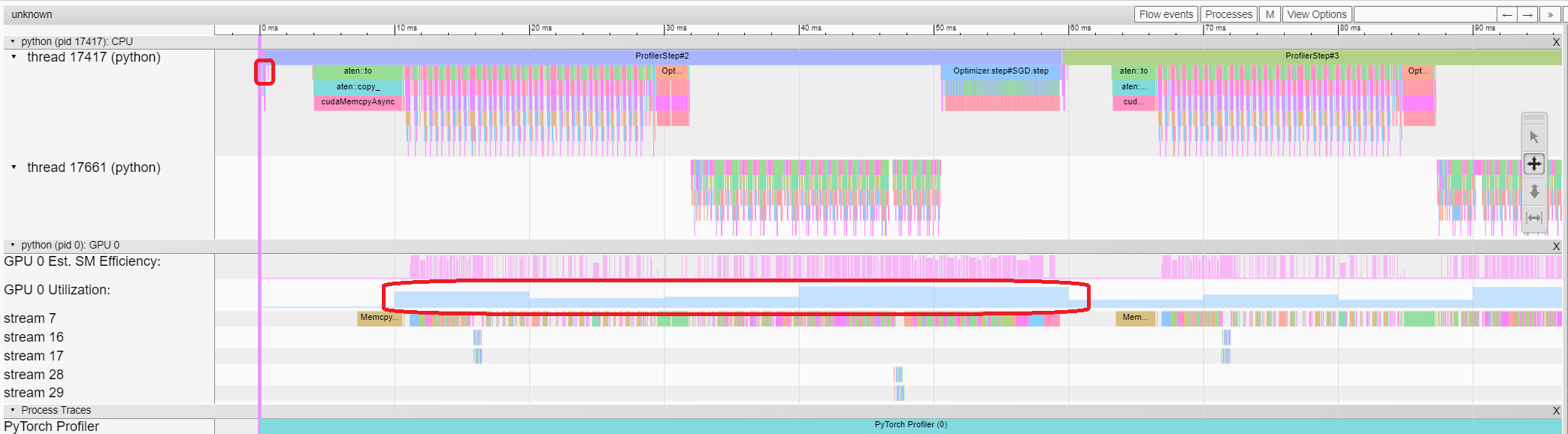
跟踪视图显示被分析的操作符和 GPU 内核的时间轴。您可以选择它以查看更多详情,如下所示。
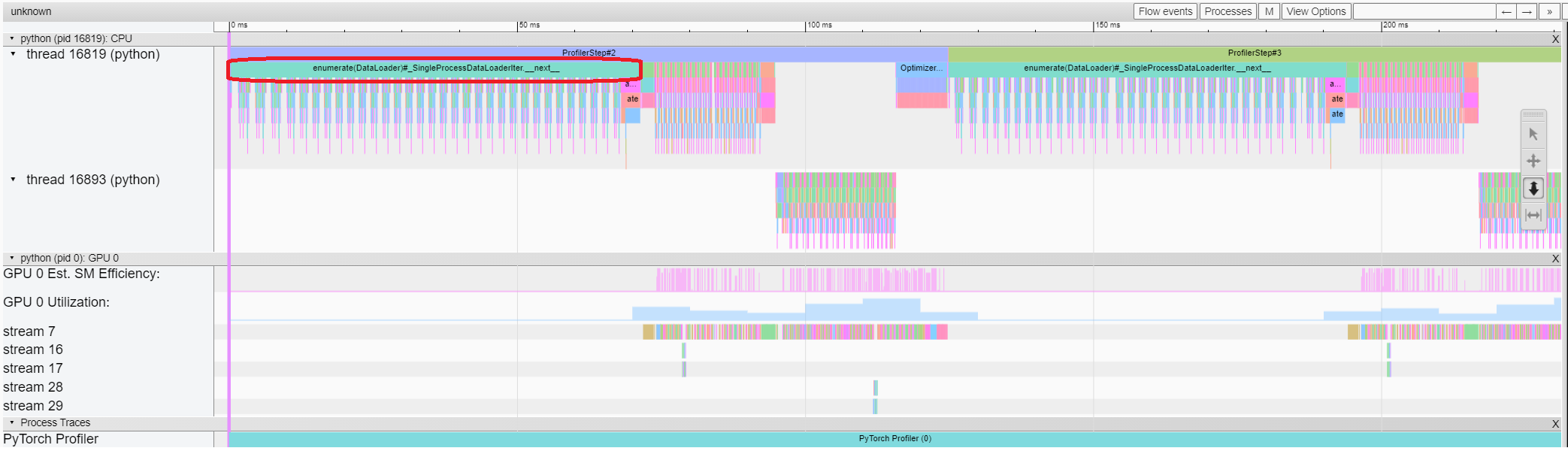
通过右侧工具栏可以移动图表并放大/缩小,同时键盘也可用于缩放和在时间轴中移动。“w”和“s”键围绕鼠标中心放大,“a”和“d”键左右移动时间轴。您可以多次按这些键,直到看到易于读取的表示。
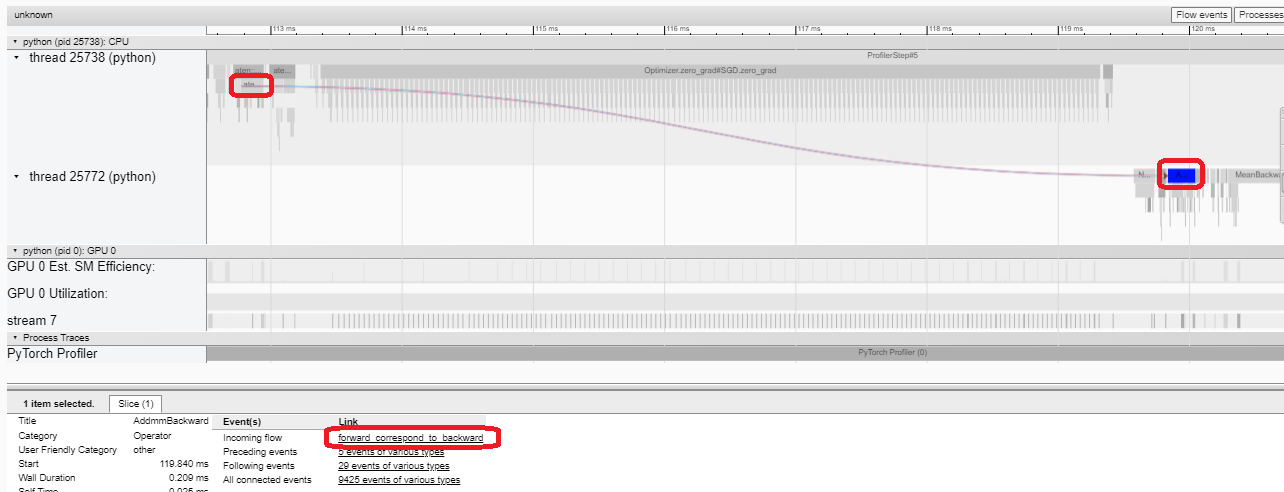
如果某个后向操作符的“传入流量”字段的值为“前向对应后向”,您可以单击文本以获得其启动的前向操作符。
在此示例中,我们可以看到前缀为 enumerate(DataLoader) 的事件花费了大量时间。在此期间大部分时间内,GPU 都处于空闲状态。因为该功能在主机端加载数据并对数据进行转换,在此期间 GPU 资源被浪费。
5. 在分析器的帮助下提高性能¶
在“概览”页面底部,“性能建议”中的提示表明瓶颈是 DataLoader。PyTorch 的 DataLoader 默认使用单进程。用户可以通过设置参数 num_workers 启用多进程数据加载。更多详情请参考此处。
在此示例中,我们遵循“性能建议”,设置 num_workers 如下,传递一个不同的名称比如 ./log/resnet18_4workers 给 tensorboard_trace_handler,然后再次运行它。
train_loader = torch.utils.data.DataLoader(train_set, batch_size=32, shuffle=True, num_workers=4)
然后让我们在左侧“运行”下拉列表中选择最近分析的运行。
从上述视图中,我们可以发现步骤时间减少到约 76 毫秒,与之前运行的 132 毫秒相比下降了很多,而时间减少主要归功于 DataLoader。
从上述视图中,我们可以看到 enumerate(DataLoader) 的运行时间有所减少,并且 GPU 利用率有所提高。
6. 使用其他高级功能分析性能¶
内存视图
要分析内存,必须在 torch.profiler.profile 的参数中将 profile_memory 设置为 True。
您可以通过使用 Azure 上的现有示例尝试它。
pip install azure-storage-blob
tensorboard --logdir=https://torchtbprofiler.blob.core.windows.net/torchtbprofiler/demo/memory_demo_1_10
分析器在分析期间记录所有内存分配/释放事件以及分配器的内部状态。内存视图包括如下所示的三个组件。
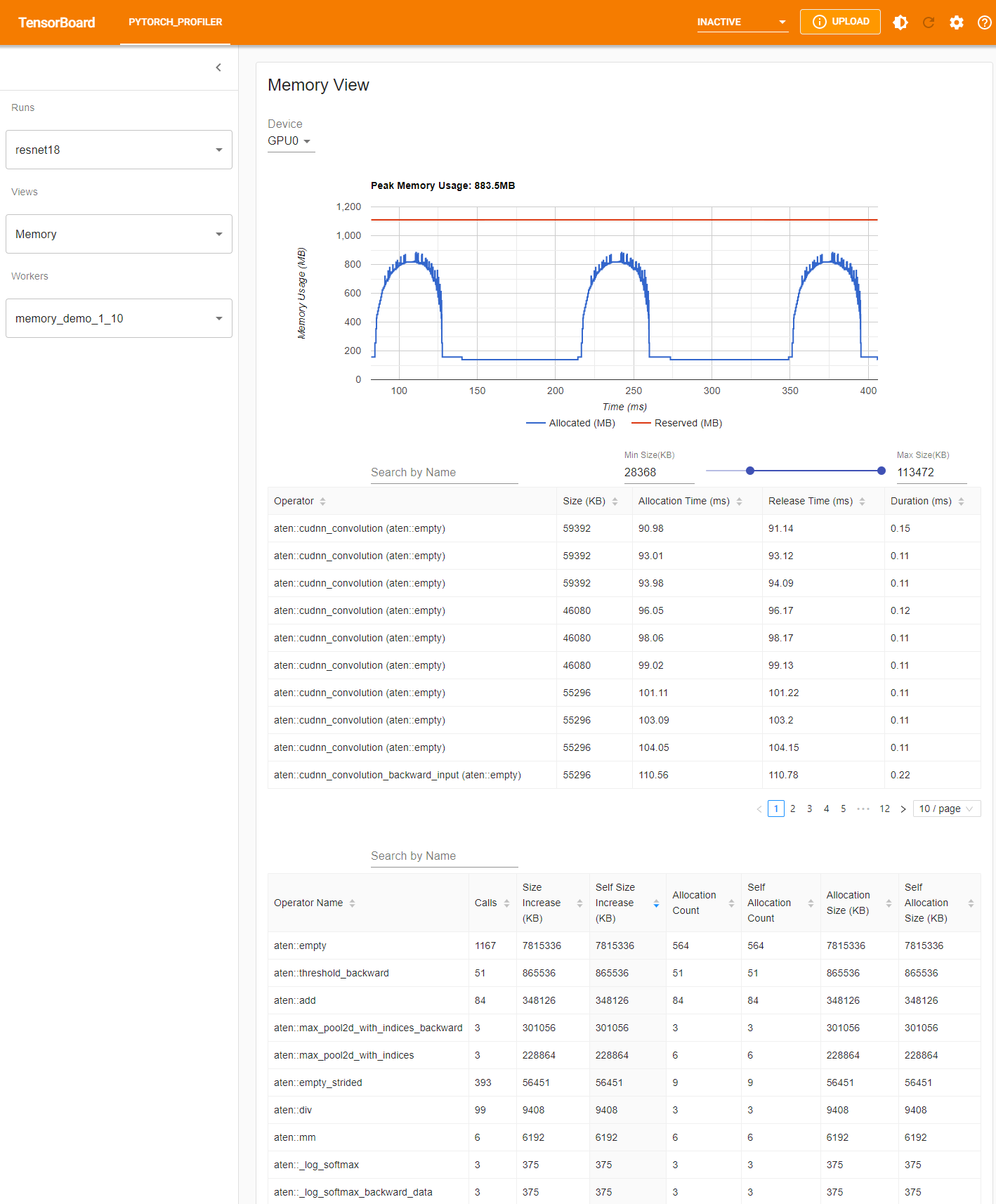
这些组件分别是从上到下的内存曲线图、内存事件表和内存统计表。
可以在“设备”选择框中选择内存类型。例如,“GPU0”表示以下表格仅显示每个操作符在 GPU 0 上的内存使用情况,不包括 CPU 或其他 GPU。
内存曲线显示内存消耗的趋势。“Allocated”曲线显示实际上正在使用的总内存,例如,张量。在 PyTorch 中,CUDA 分配器和其他分配器采用缓存机制。“Reserved”曲线显示分配器保留的总内存。您可以左键单击并拖动图表以选择所需范围的事件:
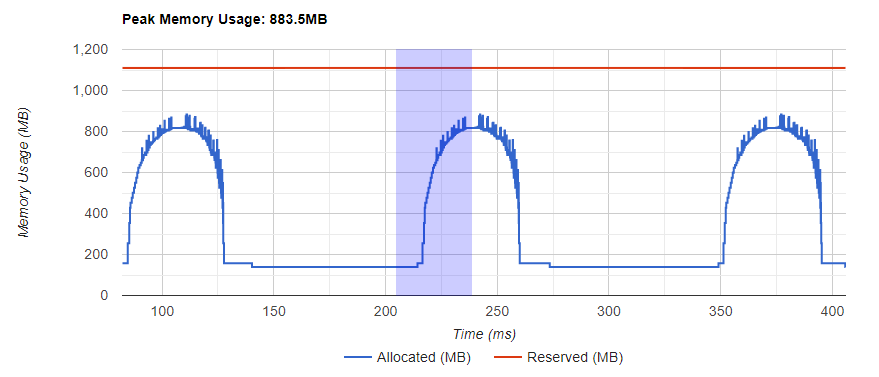
选择后,三个组件将针对所选时间范围更新,以便您获得更多信息。重复此过程,可缩放至非常详细的水平。右键单击图表将重置图表到初始状态。
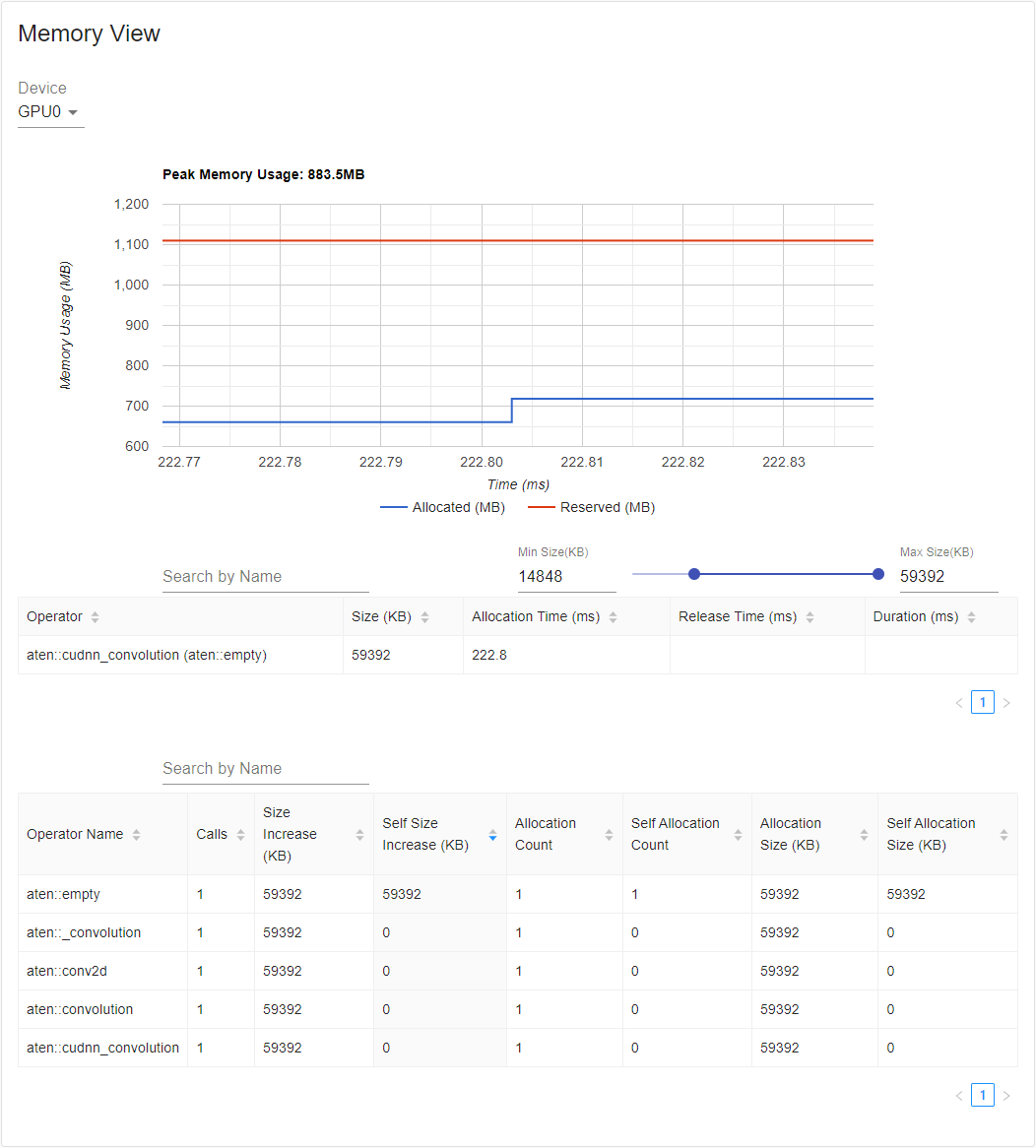
在内存事件表中,分配和释放事件配对为一个条目。“操作符”列显示导致分配的直接 ATen 操作符。注意,在 PyTorch 中,ATen 操作符通常使用 aten::empty 分配内存。例如,aten::ones 实现为 aten::empty 后跟 aten::fill_。单独显示操作符名为 aten::empty 帮助不大。在这种特殊情况下将显示为 aten::ones (aten::empty)。“分配时间”、“释放时间”和“持续时间”列的数据可能会缺失,若事件发生在选定时间范围之外。
在内存统计表中,“大小增加”列汇总所有分配大小并减去所有内存释放大小,即该操作符后内存使用的净增加。“自身大小增加”列类似于“大小增加”,但不统计子操作符的分配。考虑到 ATen 操作符的实现细节,有些操作符可能调用其他操作符,因此内存分配可能发生在调用堆栈的任何级别。这就是说,“自身大小增加”只统计当前调用堆栈级别的内存使用增加。最后,“分配大小”列汇总所有分配,不考虑内存释放。
分布式视图
该插件现在支持使用 NCCL/GLOO 作为后端的分析 DDP 分布式视图。
您可以通过使用 Azure 上的现有示例尝试它:
pip install azure-storage-blob
tensorboard --logdir=https://torchtbprofiler.blob.core.windows.net/torchtbprofiler/demo/distributed_bert
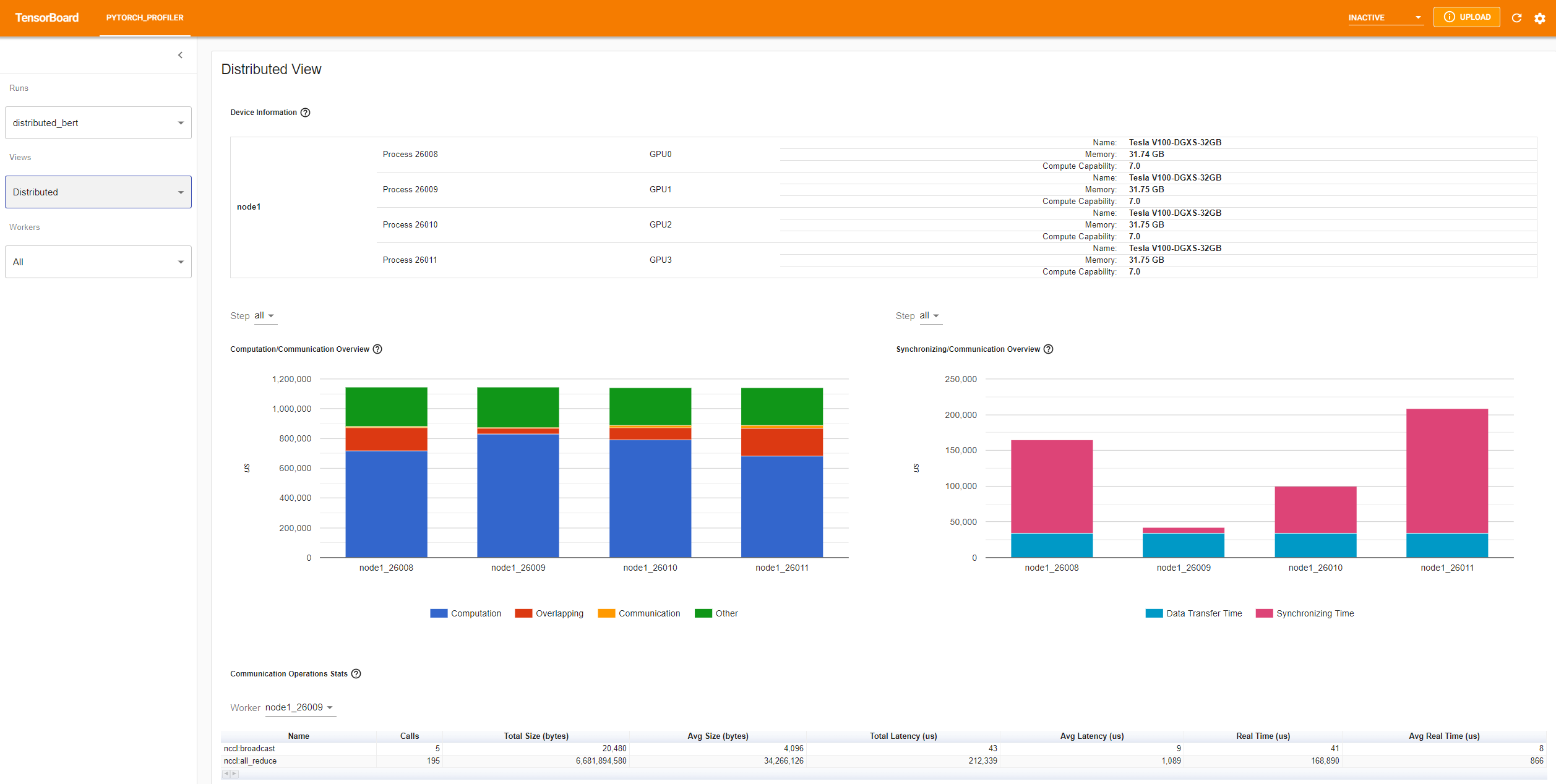
“计算/通信概览”显示计算/通信比例及其重叠程度。从该视图中,用户可以发现工人的负载平衡问题。例如,如果一个工人的计算+重叠时间远大于其他工人,则可能存在负载平衡问题或该工人可能是慢速工人。
“同步/通信概览”显示通信效率。“数据传输时间”是实际数据交换的时间。“同步时间”是等待和与其他工人同步的时间。
如果一个工人的“同步时间”远短于其他工人的,此工人可能是一个慢速工人,可能计算负载高于其他工人。
“通信操作统计”总结每个工人中所有通信操作的详细统计信息。
7. 额外实践:在 AMD GPU 上分析 PyTorch¶
AMD ROCm 平台是专为 GPU 计算设计的开源软件栈,包括驱动程序、开发工具和 API。我们可以在 AMD GPU 上运行上述步骤。在本节中,我们将使用 Docker 安装 ROCm 基础开发镜像,然后安装 PyTorch。
为了举个例子,我们创建一个名为 profiler_tutorial 的目录,并将 步骤 1 中的代码保存为 test_cifar10.py 文件,保存在这个目录中。
mkdir ~/profiler_tutorial
cd profiler_tutorial
vi test_cifar10.py
在撰写本文时,PyTorch 在 ROCm 平台上的稳定版(2.1.1)Linux 版本为 ROCm 5.6。
从 Docker Hub 获取已安装正确的用户空间 ROCm 版本的基础 Docker 镜像。
镜像为 rocm/dev-ubuntu-20.04:5.6。
启动 ROCm 基础 Docker 容器:
docker run -it --network=host --device=/dev/kfd --device=/dev/dri --group-add=video --ipc=host --cap-add=SYS_PTRACE --security-opt seccomp=unconfined --shm-size 8G -v ~/profiler_tutorial:/profiler_tutorial rocm/dev-ubuntu-20.04:5.6
在容器内部,安装任何用于安装 wheels 包的依赖项。
sudo apt update
sudo apt install libjpeg-dev python3-dev -y
pip3 install wheel setuptools
sudo apt install python-is-python3
安装 wheels 包:
pip3 install torch torchvision torchaudio --index-url https://download.pytorch.org/whl/rocm5.6
安装
torch_tb_profiler,然后运行 Python 文件test_cifar10.py:
pip install torch_tb_profiler
cd /profiler_tutorial
python test_cifar10.py
现在,我们已经有了在 TensorBoard 中查看所需的数据:
tensorboard --logdir=./log
选择不同的视图,如 步骤 4 中所描述。例如,下面是 Operator 视图:
在撰写本节内容时,Trace 视图无法正常工作,显示为空。可以通过在 Chrome 浏览器中输入 chrome://tracing 来解决。
将
~/profiler_tutorial/log/resnet18目录下的trace.json文件复制到 Windows 中。
如果文件位于远程位置,您可能需要使用 scp 来复制文件。
点击 Load 按钮,从浏览器中的
chrome://tracing页面加载 trace JSON 文件。
如之前提到的,您可以移动图表并进行放大或缩小。您还可以使用键盘在时间轴内缩放和移动。w 和 s 键以鼠标为中心放大,a 和 d 键左右移动时间轴。您可以多次按下这些键,直到看到可读的表示形式。
